

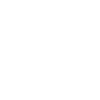

Questa immagine è stata scattata lo scorso 2 dicembre dalla Navigation Camera (Navcam) a bordo del rover Curiosity della NASA su Marte. Il robot stava utilizzando il suo trapano per studiare il terreno roccioso nel sito “Precipice” alla base del Monte Sharp. Crediti: NASA/JPL-Caltech
Siamo tutti affezionati a quel robottino dal nome “curioso” che gira indisturbato su Marte tra rocce appuntite e sabbia fine. Di recente, però, il rover Curiosity della NASA (sul Pianeta rosso dal 2012) ha registrato qualche problema dovuto (forse) a un detrito incastrato nel motore che permette il funzionamento del trapano di bordo e che ne ha impedito l’utilizzo per più di un mese. Il detrito potrebbe essere di origine marziana o di origine terrestre (potrebbe risalire ai tempi del lancio nel 2011). Per adesso i tecnici della NASA stanno ancora valutando i dati e le diverse ipotesi.
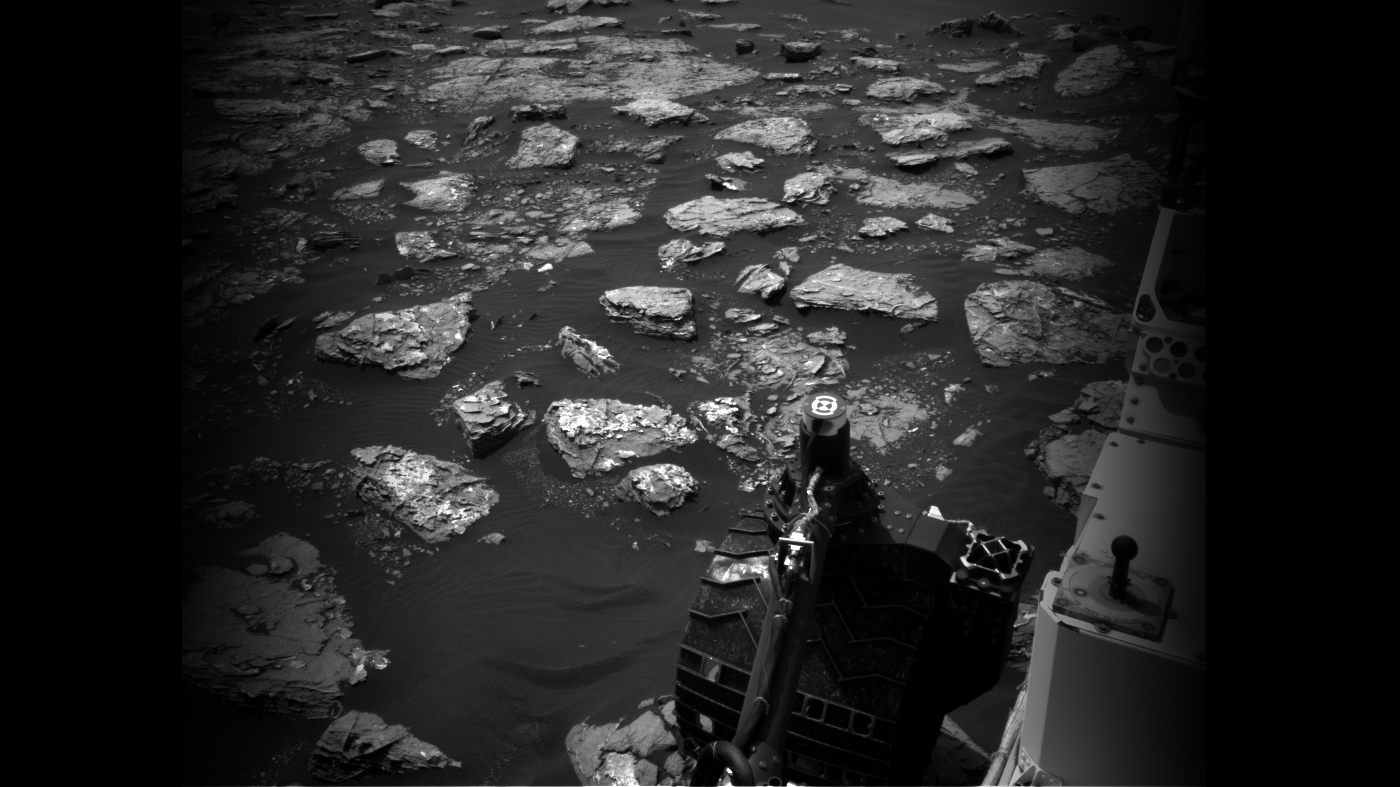
Il rover a sei ruote ricomincerà a lavorare a ritmi nominali (si spera) domani, 3 gennaio 2017, e si concentrerà su delle interessanti fratture nella zona di “Old Soaker”. In attesa di ripartire con le solite operazioni osservative e di raccolta di campioni scientifici, il laboratorio su sei ruote “si sta guardando attorno”, monitorando l’ambiente circostante. Curiosity si trova in una zona bassa del Monte Sharp.
La zona di Old Soaker. Crediti: NASA
Il problema al trapano è stato registrato per la prima volta a inizio dicembre: il braccio non si è allungato per raggiungere l’obiettivo prescelto. Steve Lee, vice project manager di Curiosity, ha spiegato che stanno ancora cercando di definire «una serie di test diagnostici per valutare attentamente il meccanismo di alimentazione del trapano. Stiamo usando il nostro rover di test sulla Terra per fare le ultime prove prima che vengano eseguiti i test su Marte. Per essere prudenti, fino a quando non procederemo con i test su Curiosity, vogliamo evitare eventuali cambiamenti che potrebbero influenzare la diagnosi». Ciò significa nessun movimento del braccio meccanico e del rover. Quasi sicuramente il problema è al motore che permette l’estensione del braccio su cui è montato il trapano. Di tentativi ne sono stati fatti molti: gli “autisti” terrestri di Curiosity hanno anche guidato il rover per tragitti brevi e attivato gli agitatori all’interno del trapano per testare la risposta del motore di alimentazione al movimento, ha spiegato Jim Erickson (project manager di Curiosity). Gli agitatori sono utilizzati, di solito, per suddividere la polvere di roccia raccolta dal trapano.
Da quando è atterrato nel cratere Gale, Curiosity ha percorso ben 15,01 chilometri (6 dei quali solo nel 2016), tra dune di sabbia e rocce marziane. Il rover ha “scalato” 165 metri in altezza mentre cerca di arrivare in cima al Monte Sharp per studiare i cambiamenti climatici che hanno coinvolto il pianeta Marte nel corso di miliardi di anni. Per questi studi scientifici è di fondamentale importanza il trapano che finora è stato utilizzato 15 volte (solo nel 2016 il trapano ha effettuato sei prelievi). Il trapano combina due funzioni, una martellante e una roteante e perforante (proprio come un trapano che useremmo sulla Terra). Queste funzioni permettono di forare e triturare la roccia marziana, per poi raccoglierne (allo stesso tempo) dei campioni. Il tentativo (poi fallito) di utilizzare per la sedicesima volta il trapano sarebbe stato il primo senza la funzione di percussione, questo perché da febbraio 2015 si sono verificati diversi cortocircuiti a questo meccanismo e i tecnici vogliono evitare ulteriori problemi e malfunzionamenti su target davvero importanti.
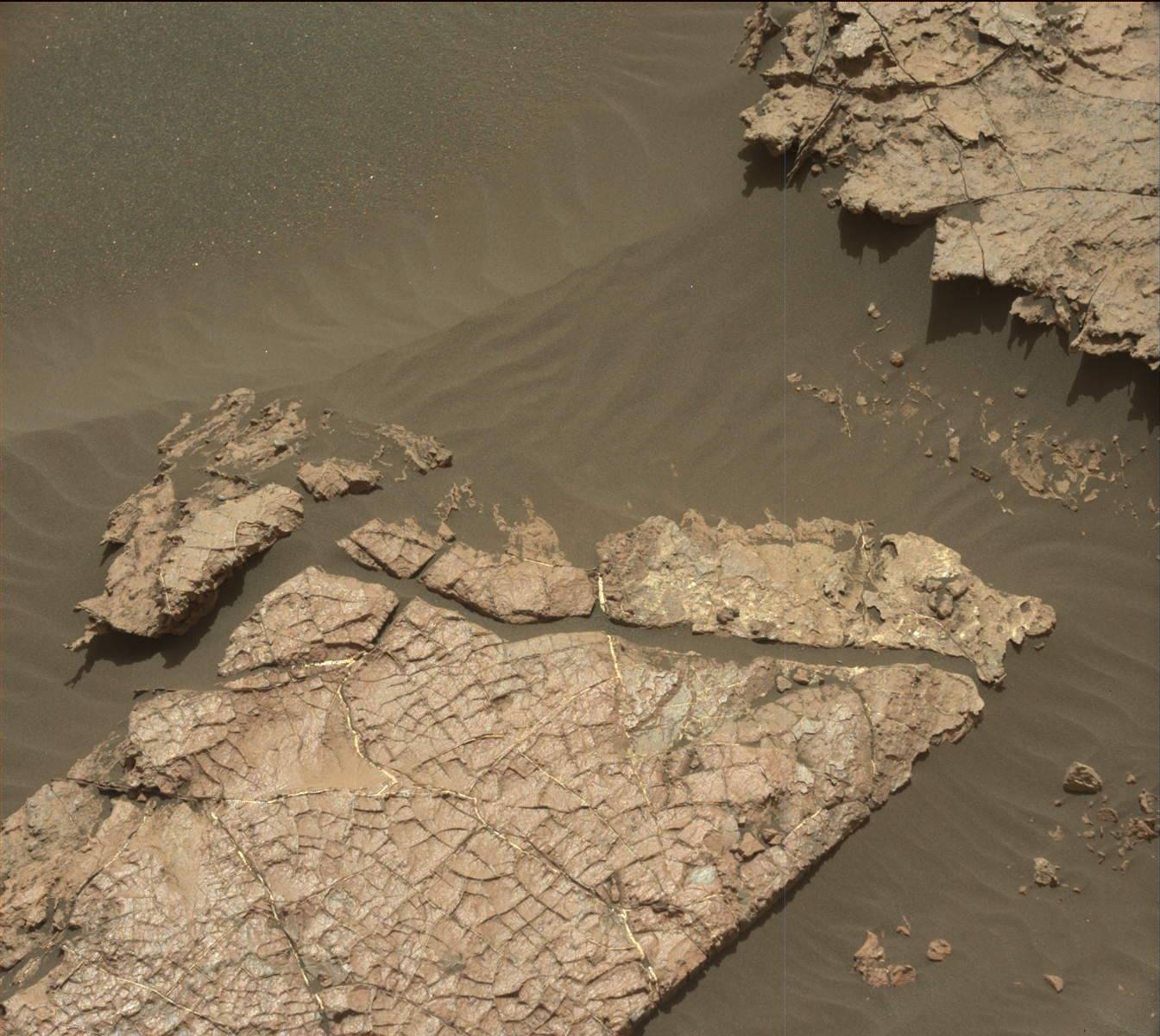
L’immagine scattata dalla Hazard Avoidance Camera (Hazcam) il 13 gennaio 2015 al trapano. Crediti: NASA/JPL-Caltech
Ingegneri e scienziati della NASA hanno passato i giorni di vacanza tra Natale e Capodanno a cercare di capire come far funzionare ancora questo importantissimo strumento, senza il quale i numerosi obiettivi di ricerca scientifica non potranno essere portati a termine. Da domani, per fortuna, si dovrebbe tornare a lavorare con gli altri strumenti. Le telecamere a bordo avranno un gran da fare: in programma di ci sono delle osservazioni multispettrali della Mastcam sui target “Old Soaker” e “Schooner Head”; la Navcam andrà in cerca di vortici di sabbia, mentre la ChemCam si occuperà dei target “Moore Harbor”, “Northeast Harbor”, “Goose Cove,” “Deep Cove,” e “Dix Point” per valutare se ci sono dei cambiamenti per quanto riguarda gli elementi chimici. Saranno a pieno regime anche gli strumenti MAHLI, APXS e SAM.
Semmai si trattasse davvero di un detrito di origine sconosciuta, un ‘FOD’ (dall’inglese foreign object debris) non è chiaro, così com’è ancora troppo presto per dire se il problema potrà essere risolto o se rischia di compromettere la futura attività scientifica del robottino. In ogni caso, in futuro gli ingegneri potrebbero dover cambiare il loro modo di utilizzare il trapano e, chissà, migliorare anche la progettazione di trapani futuri, come ad esempio il dispositivo in fase di sviluppo per il rover della missione ExoMars 2020.