





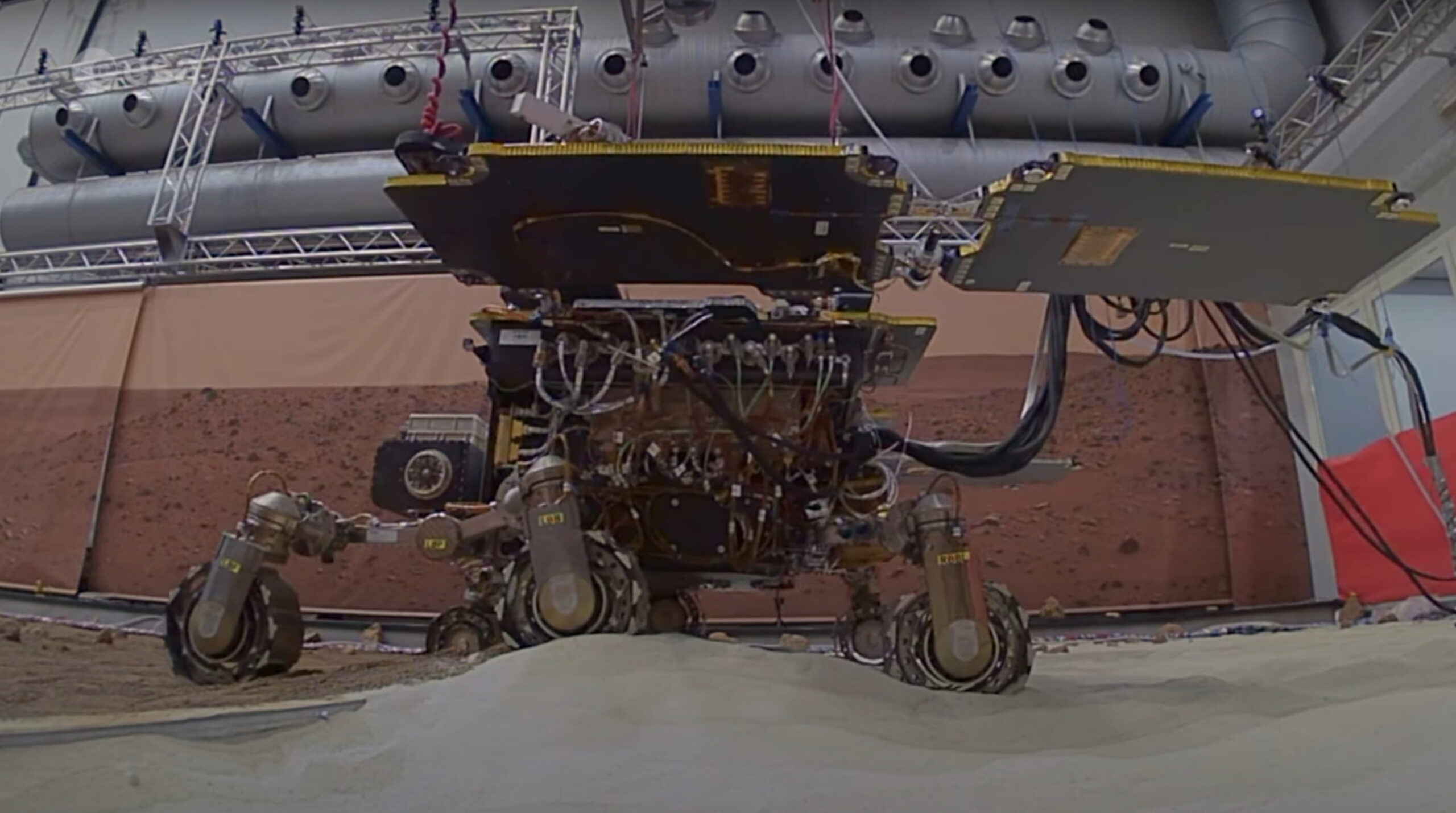
Il rover Rosalind Franklin durante i test di wheel walking nel Mars Terrain Simulator, presso la sede dell’Altec a Torino. Crediti: Thales Alenia Space
Il maltempo non è mai piacevole, né sulla Terra né altrove nel Sistema solare. Lo sanno bene i rover marziani Spirit e Opportunity, intrepidi esploratori del Pianeta rosso rimasti intrappolati nelle tempeste di sabbia. Proprio come accade a un’auto in condizioni di fango o neve, anche su Marte, quando un rover rimane bloccato nella sabbia, girare le ruote non fa altro che scavare ancora più in profondità. È proprio per evitare questo tipo di inconvenienti che il rover Rosalind Franklin della missione ExoMars, programma in collaborazione tra l’Agenzia spaziale europea (Esa) e la russa Roscosmos, è dotato di un sistema speciale di locomozione chiamato wheel walking – in italiano: camminata su ruote.
«Speriamo di non dover mai usare la camminata su ruote per sfuggire a pericolose trappole di sabbia su Marte, ma siamo lieti di avere a disposizione tale funzionalità per salvaguardare potenzialmente la missione», commenta Luc Joudrier, manager delle operazioni del rover ExoMars per Esa, il cui lancio è previsto tra il 20 settembre e il primo ottobre 2022. «Dal punto di vista operativo del rover, questa è davvero la nostra assicurazione per terreni difficili».
La camminata su ruote combina il movimento di una serie di attuatori – le “gambe” del rover – con la rotazione delle ruote per procedere senza slittare: un movimento che offre ottima trazione su terreni morbidi e pendii elevati, come le dune marziane. In una serie di test recenti, questo sistema ha permesso al rover, le cui due ruote anteriori erano inizialmente quasi del tutto sepolte nella sabbia, di liberarsi facilmente dalla trappola, percorrendo in circa venti minuti un percorso di 2 metri. Lentamente e con molta attenzione, si intende.
I test sono stati condotti a novembre all’interno del Mars Terrain Simulator, un terreno marziano simulato che si trova al Rover Operations Control Centre nella sede dell’Altec, presso gli stabilimenti di Thales Alenia Space a Torino. È da qui che partiranno i comandi per il rover, una volta atterrato sul suolo marziano nel giugno 2023. Nel frattempo, ci si allena a simulare le operazioni tecniche e scientifiche.
Come si vede dalle riprese effettuate durante i test, una volta che le quattro ruote anteriori hanno acquisito una buona trazione sul terreno più stabile, le ruote posteriori diventano trainanti: si tratta di una sequenza ottimizzata per arrampicarsi su pendii ripidi anziché su terreni più soffici. Come quando ci si arrampica su un pendio innevato, assicurando ogni passo prima di fare il successivo, anche in questa sequenza di comandi a ogni movimento delle gambe segue una breve rotazione delle ruote, affinché queste riescano ad ancorarsi, scavando un po’ nel terreno, prima di spostare tutto il resto. Su terreni più solidi, questo sistema di ancoraggio non è altrettanto efficace, anzi può creare un effetto di trascinamento, e quindi può essere escluso dalla sequenza di comandi.
Guarda il video dell’Esa sui test di camminata su ruote del rover Franklin: