





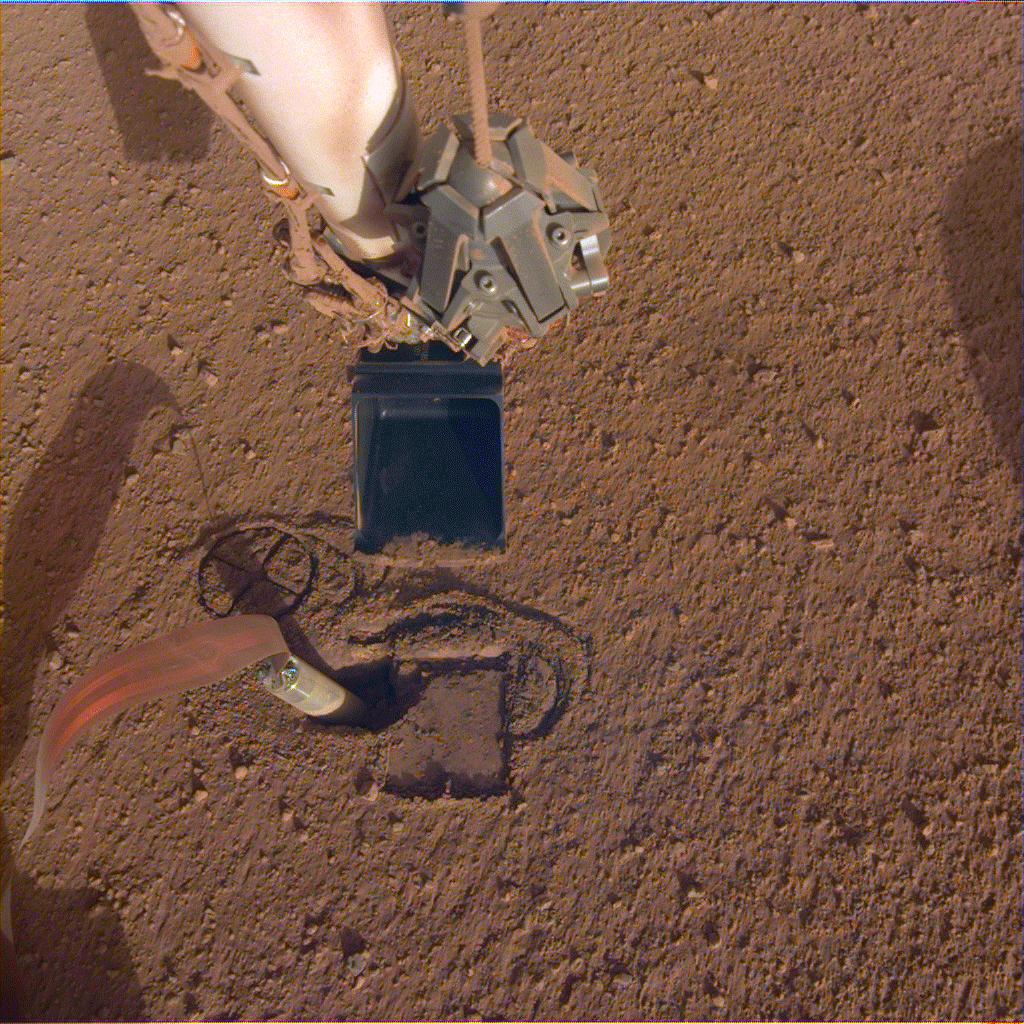
La “talpa” semiaffondata e il braccio robotico con la pala meccanica della missione InSight su Marte. Crediti: Nasa/Jpl-Caltech
Autunno. Cadono le prime foglie nell’emisfero nord di Terra, ma non le speranze dei tecnici della missione InSight, tutte rivolte al buon esito di un nuovo tentativo per sbloccare la cosiddetta “talpa marziana”, la sonda di temperatura autoaffondante che costituisce l’elemento principale dell’esperimento Hp3. Talpa che, invece di scavarsi la tana fino ai previsti 5 metri di profondità nella fine sabbia marziana, si è fermata già al primo turno di scavo, lo scorso 28 febbraio, penetrando solo per tre quarti della sua lunghezza, circa 35 centimetri.
Dopo avere rimosso la struttura di supporto, durante la scorsa estate gl’ingegneri del Jpl/Nasa e della Dlr tedesca – che ha progettato lo strumento – hanno provato a riempire il piccolo cratere che si è formato attorno alla sonda con l’ausilio della piccola pala meccanica di cui è dotato il braccio robotico. La manovra non ha avuto successo a causa dell’inaspettata durezza della crosta superficiale, uno strato di sabbia cementificata spesso tra i 5 e i 10 centimetri, mai incontrato prima da altre missioni.
Il braccio robotico non è riuscito a far collassare la crosta attorno al cratere, premendola quanto possibile di piatto e di lama, perché è un attrezzo progettato per spostare gli strumenti dalla piattaforma principale al terreno, ma non adatto per imprimere forza al suolo, anche per l’assenza di un sensore di pressione e per la leva svantaggiosa, data dalla distanza a cui è posizionato lo strumento.
Ora gli scienziati hanno preparato la prossima mossa, che consiste nel premere lateralmente la talpa contro la parete del cratere, usando sempre la pala del braccio robotico, nella speranza di fornirle sufficiente trazione e attrito per scavare più in profondità nella superficie. La talpa, infatti, non può ora avanzare a causa della mancanza di attrito con il terreno. Questo dispositivo molto leggero può essere visto come una sorta di chiodo auto-martellante, il cui rinculo deve essere assorbito dall’attrito con il mezzo in cui sta penetrando.
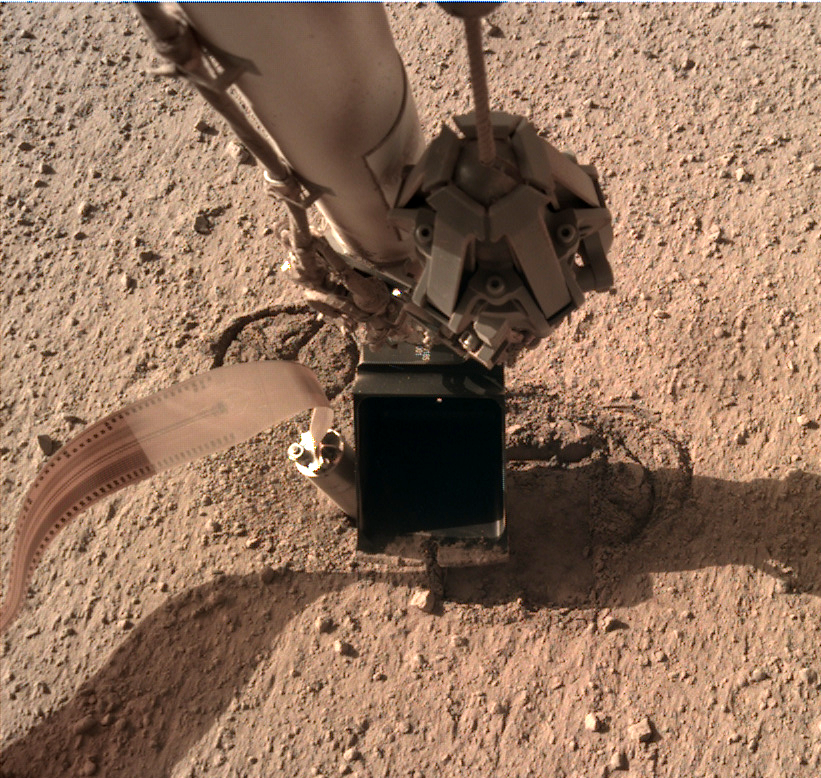
La pala meccanica appoggiata alla “talpa” dello esperimento Hp3 della missione InSight su Marte. Crediti: Nasa/Jpl-Caltech
La nuova strategia, descritta come “pinning” dal team di InSight, è stata simulata in laboratorio e verrà eseguita su Marte nelle prossime settimane. Tuttavia, mentre la simulazione permette di programmare al meglio i movimenti del braccio robotico, gli scienziati non possono replicare esattamente il terreno marziano senza ulteriori informazioni sulla sua formazione e composizione.
«Tutto quello che sappiamo sul suolo è quello che possiamo vedere nelle immagini che InSight ci invia», spiega nel suo blog il responsabile scientifico dell’esperimento Hp3, Tilman Spohn dell’Istituto di planetologia dell’agenzia spaziale tedesca Dlr. «Dal momento che non possiamo portare il terreno alla talpa, forse possiamo portare la talpa al terreno, fissandola nel buco».
Oltre al pinning, il gruppo che gestisce InSight sta anche valutando di utilizzare la pala meccanica nel modo in cui era originariamente prevista funzionare, raschiando il terreno per portare del materiale esterno nel piccolo cratere, piuttosto che cercare di comprimerlo. Gli esiti di entrambe le tecniche saranno visibili al pubblico in tempo quasi reale nelle immagini non elaborate che arriveranno da InSight nelle prossime settimane. Stay tuned!
Guarda il video Jpl/Nasa (in inglese) sulla manovra di pinning: