





Una squadra è più della somma delle sue parti: il trio di “robot con le zampe”, qui raffigurato durante un test in una cava di ghiaia in Svizzera, si è già conquistato la copertina del numero di luglio di Science Robotics. Crediti: Eth Zurich/Takahiro Mik (foto), Science Robotics
Three is a magic number, recitava un noto slogan di telefonia mobile. Alla stessa conclusione sono arrivati i ricercatori guidati dall’Eth, il Politecnico federale di Zurigo, che stanno lavorando alla realizzazione di robot per l’esplorazione lunare. Come riportato in uno studio pubblicato questa settimana su Science Robotics, avendo terminato con successo il test su terreno dell’utilizzo combinato di tre robot in contemporanea, il team svizzero sta perseguendo l’idea di inviare non un solo robot in esplorazione, ma piuttosto un’intera squadra di veicoli – dispositivi volanti compresi – che si completino a vicenda.
L’esplorazione robotica di ambienti extraterrestri è utile per far progredire la nostra comprensione del Sistema solare e per scovare potenziali risorse minerarie; sulla Luna, ad esempio, ci sono materie prime che l’umanità potrebbe un giorno estrarre e utilizzare. Diverse agenzie spaziali, fra le quali l’Agenzia spaziale europea (Esa), stanno già pianificando future missioni per esplorare meglio il nostro satellite in cerca di minerali. Ciò ha incentivato notevolmente lo sviluppo di tecnologie di esplorazione robotica. Molti obiettivi rilevanti per la scienza, per l’esplorazione e per l’estrazione di risorse sulla superficie lunare si trovano però in aree difficili da raggiungere o con proprietà fisiche sconosciute. Bocche e scogliere vulcaniche, grotte, nuovi crateri da impatto: occorrono veicoli di esplorazione adeguati per spostarsi sulla Luna. Lo sviluppo di sistemi di esplorazione robotica in grado di attraversare in modo efficiente terreni difficili e irregolari senza compromettere le capacità esplorative e di analisi scientifica rimane dunque una priorità assoluta.
I ricercatori svizzeri hanno equipaggiato tre Anymal (così li hanno chiamati, con la ‘y’), un tipo di robot a zampe sviluppato all’Eth, con una serie di strumenti di misurazione e analisi che li rendono potenzialmente adatti alle future esplorazioni lunari. Come in un lavoro di squadra, il trio di robot è stato testato su vari terreni in Svizzera e poi presso il Centro europeo per l’innovazione delle risorse spaziali (Esric), in Lussemburgo, dove qualche mese fa il team ha vinto il concorso “Esric-Esa Space Resources Challenge” per l’ideazione di robot di esplorazione lunare, insieme a colleghi del Research Center for Information Technology di Karlsruhe (Fzi), in Germania. Il concorso europeo prevedeva la ricerca e l’identificazione di minerali su un sito di prova modellato come la superficie della Luna: l’obiettivo tecnico principale della sfida era la prospezione di un ambiente analogo a quello lunare per la ricerca di aree arricchite di risorse, ossia zone con minerali adatti all’utilizzo in situ delle risorse, come ilmenite, rutilo e biossido di titanio.
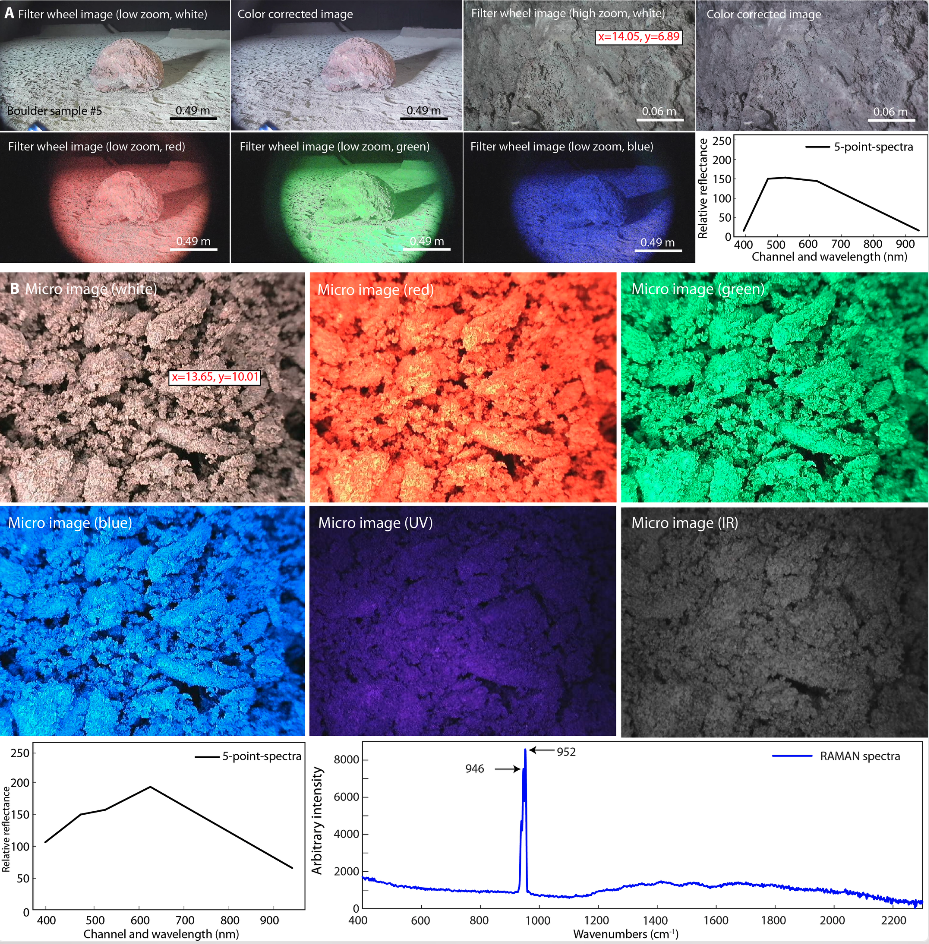
Dati scientifici catturati dai robot durante il concorso nel 2021. L’obiettivo della sfida era la prospezione di un ambiente di tipo lunare per la ricerca di aree arricchite di risorse come ilmenite, rutilo e biossido di titanio. Crediti: Science Robotics
«L’utilizzo di più robot presenta due vantaggi», spiega Philip Arm, primo autore dello studio e dottorando del gruppo guidato dal professor Marco Hutter dell’Eth. «I singoli robot possono assumere e svolgere contemporaneamente compiti specializzati. Inoltre, proprio grazie alla ridondanza, una squadra di robot è in grado di compensare il fallimento di un singolo compagno». In questo caso, ridondanza significa che le stesse apparecchiature di misura e analisi sono installate su più robot. In altre parole, ridondanza e specializzazione sono due aspetti opposti, ma necessariamente complementari. «È una questione di giusto equilibrio», dice Arm, che con gli altri ricercatori del Politecnico di Zurigo e delle università di Basilea, Berna e Zurigo ha risolto il problema rendendo due dei robot a zampe “robot specialisti” e lasciando al terzo il ruolo di “robot generalista”.
Il primo robot è stato programmato per essere particolarmente bravo nel mappare il terreno classificandone la geologia grazie a uno scanner laser e diverse telecamere, alcune delle quali in grado di effettuare analisi spettrali, per raccogliere i primi indizi sulla composizione minerale delle rocce. All’altro robot specializzato è stato insegnato a identificare con precisione le rocce utilizzando uno spettrometro Raman e una telecamera per microscopia. Il terzo robot, quello generalista, era in grado sia di mappare il terreno sia di identificare le rocce, il che significa che aveva una gamma di compiti più ampia rispetto agli specialisti, ma l’equipaggiamento di cui era dotato gli consentiva di svolgere questi compiti con minore precisione. Una sorta di assicurazione contro i guasti: questa combinazione di competenze renderebbe possibile completare le missioni lunari anche in caso di malfunzionamento di uno dei robot specialisti.
Combinazione vincente. La giuria del concorso Esric-Esa è rimasta particolarmente colpita dalle “prove su strada” dei tre robot, ma soprattutto dal fatto che i ricercatori abbiano integrato la ridondanza nel loro sistema di esplorazione per renderlo resistente a potenziali guasti. Come premio, il team vincitore ha ottenuto un contratto di ricerca di un anno utile a sviluppare ulteriormente queste tecnologie.

Capacità di movimento del robot ANYmal personalizzato su diversi modelli di terreni planetari. Crediti: Science Robotics
Ad esempio, si cercherà di rendere i futuri robot più autonomi. Attualmente, tutti i dati provenienti dai robot confluiscono in un centro di controllo, dove un operatore assegna i compiti ai singoli robot. In futuro, i robot semi-autonomi potrebbero interagire per assegnarsi direttamente i compiti l’uno all’altro, con possibilità di controllo e di intervento da parte dell’operatore.
Infine, oltre ai “robot con le zampe”, la ricerca finanziata coinvolgerà anche i robot con le ruote, di cui sarebbero esperti i ricercatori tedeschi del Fzi. «I robot con le zampe, come il nostro Anymal, sono in grado di affrontare terreni rocciosi e ripidi, ad esempio per scendere in un cratere», spiega Hendrik Kolvenbach, scienziato senior del gruppo del professor Hutter. I robot con ruote, seppur svantaggiati in questo tipo di condizioni, possono muoversi più velocemente su terreni meno impegnativi. Per una missione futura, sarebbe quindi utilissimo poter combinare diverse tipologie di robot per garantire varie modalità di locomozione. E non finisce qui: alla squadra potrebbero aggiungersi anche robot volanti.
Per saperne di più:
- Leggi l’articolo su Science Robotics “Scientific Exploration of Challenging Planetary Analog Environments with a Team of Legged Robots” di Philip Arm, Gabriel Waibel, Jan Preisig, Turcan Tuna, Ruyi Zhou, Valentin Bickel, Gabriela Ligeza, Takahiro Miki, Florian Kehl, Hendrik Kolvenbach e Marco Hutter
Guarda il video sul canale YouTube dell’Eth di Zurigo: