






Illustrazione della Terra circondata dai detriti spaziali. Crediti: Nasa
A febbraio 2022 l’ultimo di una serie di esperimenti iniziati nel 2021 a bordo della Stazione spaziale internazionale (Iss) ha fornito una possibile soluzione per ripulire lo spazio attorno alla Terra dai detriti orbitali e riparare i satelliti danneggiati.
Il 10 febbraio 2009, a circa 800 chilometri di altezza sopra la Siberia, si è verificato il primo scontro casuale fra due satelliti artificiali: erano Iridium 33 e Cosmos 2251. L’incidente ha prodotto quasi duemila detriti diversi di almeno dieci centimetri di diametro e moltissimi detriti più piccoli. Negli ultimi anni, è cresciuto enormemente il numero di rottami di diverse dimensioni che orbitano attorno alla Terra, con velocità fino a 28mila chilometri orari. Sono satelliti non più funzionanti, terzi stadi dei razzi usati per i lanci e frammenti che nascono in seguito a collisioni o esplosioni. Da grandi satelliti guasti a piccole viti o pezzi di vernice, le stime più recenti parlano di circa 20mila detriti con dimensioni maggiori di 10 centimetri e circa 130 milioni di detriti con dimensioni fra 0.1 e 10 centimetri. Quelli più grandi sono tracciati dalle reti di sorveglianza spaziale, mentre quelli più piccoli sfuggono alle osservazioni da Terra e sono quantificati solo grazie a stime statistiche. Vari enti si occupano di monitorare i detriti spaziali, trovare il modo di ridurne la produzione e rimuovere quelli che già affollano lo spazio.
Come abbiamo anticipato, a bordo della Stazione spaziale internazionale alcuni esperimenti hanno permesso di trovare una possibile soluzione per ripulire lo spazio. I protagonisti di questi esperimenti sono gli Astrobee, robot a forma di cubo con lati pari a circa 30 centimetri, che dal 2019 aiutano gli astronauti a svolgere compiti di routine in modo autonomo o telecomandato. Il progetto, dal nome TumbleDock, coinvolge il German Aerospace Center (Dlr), il Mit e la Nasa.

Roberto Lampariello e, sullo schermo, un robot Astrobee
Per capire come è andata sulla Iss, abbiamo raggiunto il principal investigator del progetto, Roberto Lampariello, nato a Roma e ricercatore al Dlr.
Robotica, satelliti e detriti spaziali: può raccontarci un po’ del suo mondo?
«Lavoro in Germania all’Istituto di robotica e meccatronica, un ente a metà fra l’università e l’industria. Ci occupiamo di sistemi che possono essere usati in applicazioni reali perché uno dei principali obiettivi dell’istituto è la cosiddetta technology transfer. Nel nostro ente c’è una parte dedicata allo spazio: in particolare, c’è una sezione che si occupa dell’esplorazione planetaria e una che si occupa della robotica orbitale. Una lunga storia di attività che inizia nel 1993: negli anni ci siamo specializzati in manovre di assemblaggio e assistenza per i satelliti in orbita e nella rimozione di detriti spaziali. Personalmente, mi occupo di robotica orbitale da molti anni. Uno degli obiettivi principali di questo settore è la manutenzione dei satelliti. Ad esempio, un satellite in avaria che volteggia nello spazio in modo incontrollato deve essere raggiunto, acchiappato e stabilizzato. La prima cosa da fare è mettere a punto la manovra di avvicinamento, cosa fondamentale anche per la rimozione di detriti».
Dal 2019 si occupa del progetto TumbleDock, cosa avete fatto?
«In TumbleDock ci siamo occupati proprio dell’avvicinamento a un target che ruota nello spazio. Un astronauta che si trova davanti un oggetto che volteggia nel vuoto può riuscire ad afferrarlo quasi a occhi chiusi, il nostro obiettivo è riuscire a far fare la stessa cosa a un robottino. Per le manovre di avvicinamento, ci sono una serie di cose che bisogna testare. Inizialmente si lavora con delle simulazioni, ma poi per implementare i test è necessario lavorare in sistemi reali, perché si imparano tante cose che in simulazione non vengono fuori o che non hanno rilevanza. Il sistema reale in cui abbiamo lavorato è la Stazione spaziale internazionale, cioè un ambiente in assenza di gravità. Abbiamo usato due robot Astrobee, uno faceva da target e l’altro aveva il compito di avvicinarlo. Gli Astrobee sono sistemi reali con il loro computer di bordo e i loro sensori. Quindi, abbiamo potuto lavorare con un sistema vero in una situazione realistica con assenza di gravità proprio come in orbita».
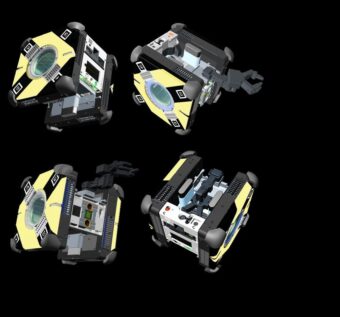
Un robot Astrobee da diverse prospettive, da sinistra in alto in senso orario: fronte anteriore, modulo di propulsione destro e vani di carico inferiore; modulo di propulsione sinistro, vano di carico superiore e braccio esteso; vano di carico superiore con braccio appoggiato; fronte posteriore con l’interfaccia di attracco e braccio esteso. Crediti: Nasa
Quante sessioni di esperimenti siete riusciti a compiere sulla Stazione spaziale internazionale?
«In tutto abbiamo fatto tre sessioni, una a maggio 2021, una lo scorso gennaio e l’ultima a febbraio. Ognuna di queste durava circa sei ore, pochissimo. In una missione vera, con un satellite vero, sarebbe tutto diverso, perché può funzionare tutto la prima volta, ma c’è anche il rischio di combinare guai più seri. Per esempio, se nell’avvicinarsi a un satellite non funzionante si rompe anche il robot in avvicinamento, avremmo due rottami non funzionanti uno accanto all’altro».
Come è andata l’ultima sessione, a febbraio 2022?
«Siamo riusciti a far ruotare il target stabilmente e siamo riusciti a far funzionare un pianificatore di percorso, che dà una traiettoria di riferimento tenendo conto di tutti i vincoli del moto della manovra. In qualche occasione, purtroppo meno di quelle che speravamo, siamo riusciti a eseguire anche la manovra di avvicinamento».
Come avete gestito il fatto che eravate a Terra mentre l’esperimento si volgeva sulla Stazione spaziale?
«La stazione di riferimento a Terra era all’Ames Research Center della Nasa e noi eravamo in contatto con loro e con i colleghi e le colleghe del Mit in una conference room. Inoltre, c’era un live stream dalla Stazione spaziale internazionale per seguire in diretta gli esperimenti. Avevamo fatto una tabella di comandi codificati che rappresentavano i vari test che volevamo fare: c’erano gli unit test, per testare le singole componenti, e poi c’erano i test di tutta la sequenza di funzionalità per diversi moti rotatori del target. Abbiamo preparato diversi esempi, con diverse posizioni relative del target e del robot in avvicinamento. L’astronauta Mark Vande Hei prendeva i due robottini e li metteva uno davanti all’altro nella posizione che avevamo predefinito e poi partivano gli esperimenti».
L’astronauta Mark Vande Hei. Crediti: Nasa
È capitato qualche imprevisto nelle sessioni?
«Ci sono stati dei problemi di localizzazione, cioè l’Astrobee non riusciva a localizzare se stesso. Il controllo del piccolo robot ha bisogno della localizzazione per sapere dov’è ed eseguire i comandi. Nello specifico, gli viene fornito un comando che gli dice dove stare e dove andare. Con il moto rotatorio, la localizzazione è particolarmente difficile e alla prima sessione del 2021 ci sono state delle difficoltà. La sessione di gennaio 2022 è stata dedicata ad analizzare questo problema. Grazie a un filtro di Kalman e ad altre migliorie da parte della Nasa ce l’abbiamo fatta. Superare questa difficoltà è stato un successo e a febbraio non abbiamo avuto problemi».
Com’è stare seduto nel proprio ufficio e seguire il proprio esperimento che va avanti nello spazio?
«Lavorare in un sistema in orbita è molto eccitante, ma richiede più impegno. Non è come lavorare su un sistema in laboratorio qui in istituto, dove se una cosa non funziona ci armiamo di cacciavite e – fra smontare e rimontare – si risolve il problema. In orbita, c’è molta meno flessibilità e bisogna sfruttare le opportunità che si hanno. Questa esperienza sulla Iss mi ha un po’ aperto gli occhi su un aspetto molto importante: la robotica dentro la Stazione spaziale internazionale è in sé un campo di applicazione estremamente rilevante. Per esempio, ora si parla di una nuova stazione che dovrebbe orbitare la Luna in cui gli astronauti dovrebbero essere presenti per una parte minima del programma operativo e quindi la manutenzione e tutto quanto la dovrebbero fare i robot. A lungo termine la robotica ambisce a sostituire gli astronauti per svolgere alcune attività nello spazio».
Dunque, lavorare sulla Stazione spaziale internazionale ci avvicina ancora di più allo spazio, ma c’è qualcosa che non si riesce a fare?
«Ci sono alcuni aspetti che non si riescono a testare sulla Stazione spaziale internazionale. Tutta l’elettronica dei robot, come quella dei satelliti, deve essere costruita appositamente per non essere danneggiata dalla radiazione e dai gradienti termici, non presenti all’interno della Iss. Questa, però, non è una cosa molto impegnativa, è stata già fatta e non è niente di nuovo. Invece un aspetto molto impegnativo riguarda l’illuminazione. Sulla Iss, ovviamente, non ci sono le situazioni di illuminazione reali che vivono i veicoli in avaria nello spazio, come la luce del Sole troppo forte che riflette sulle superfici o strane ombre. Queste cose non le abbiamo potute testare, ma gestire l’illuminazione di un oggetto che si vuole acchiappare è molto importante».

Uno dei tre Astrobee a bordo della Stazione spaziale internazionale. Crediti: Nasa
Ma i corpi in orbita non ci aiutano in nessun modo a farsi acchiappare?
«Scoprire come gestire l’illuminazione del target da acchiappare è fondamentale perché non tutti i satelliti sono uguali. Esistono i cosiddetti satelliti cooperativi, che hanno delle caratteristiche sulla superficie per facilitare l’avvicinamento, ad esempio dei led, e poi ci sono i satelliti non cooperativi, che sono stati costruiti senza pensare che un giorno qualcuno avrebbe cercato di acchiapparli e non hanno niente per facilitare l’avvicinamento».
Perché è importante trovare il modo di avvicinare un oggetto in moto nello spazio?
«Se ci sono avarie, per quanto si voglia, se il satellite non risponde, non si può fare nulla. Lo spazio è sempre più popolato, il numero di satelliti operativi va crescendo e di conseguenza cresce anche il numero di rifiuti spaziali. Abbiamo un vero e proprio problema di spazzatura nello spazio. Il rischio è la cosiddetta sindrome di Kessler, che farebbe aumentare enormemente il numero di detriti e alcune orbite non sarebbero più accessibili. Attualmente il problema dei detriti spaziali è principalmente un problema nelle orbite basse, chiamate Leo, cioè Low Earth Orbit. Qui, normalmente, se qualcosa non va si fa rientrare il satellite nell’atmosfera terrestre, che brucerà durante il rientro eliminando il rischio di detriti. Ma proprio qui sta il problema, perché se non si può effettuare questa manovra per farli ricadere nell’atmosfera rimangono nella loro orbita per parecchio tempo e diventano pericolosi. Per questo è necessario trovare un modo per acchiapparli e ripararli o rimuoverli».
I robot Astrobee e le loro abilità nell’avvicinare un target che ruota allora sono la soluzione per tenere pulito lo spazio?
«Gli Astrobee da soli sono troppo piccoli, ma i metodi testati sugli Astrobee potrebbero servire proprio per ripulire l’orbita bassa. In altre parole, si possono usare gli stessi metodi testati con gli Astrobee su satelliti più grandi che potrebbero fare le stesse operazioni su satelliti in avaria o detriti spaziali. Per questo vogliamo migliorare la procedura che abbiamo messo a punto, ad esempio, implementando l’utilizzo di diversi sensori quando siamo molto vicini al target. Stiamo ancora analizzando i dati raccolti, quindi ci sono ancora molte cose da scoprire e molti aspetti da affrontare, ma essere riusciti a effettuare la manovra di avvicinamento è un primo grande successo».
Guarda il servizio video di MediaInaf Tv: