






Prototipo di illuminazione a Led costruito per l’esplorazione dei poli lunari con il rover della Nasa Viper. Crediti: Nasa/Dominic Hart
Spostarsi nell’oscurità, attraversare un viale alberato ricco di giochi di luce e ombre, o passare repentinamente da un’autostrada soleggiata a una buia galleria: tutte situazioni routinarie per noi conducenti di “rover” terrestri. Le zone d’ombra, qui sulla Terra, non sono invero completamente buie e consentono quasi sempre di scorgere ostacoli fisici, qualora ve ne siano.
Dove sta dunque il problema? A doverselo porre sono gli scienziati della Nasa che lavorano al rover Viper, perché sulla Luna – come su altri corpi privi di atmosfera – le cose non sono così semplici.
La Luna infatti non è abbastanza grande e pesante da trattenere un’atmosfera significativa, e con essa le particelle di aria che possano riflettere e diffondere la luce del Sole – fenomeno che sulla Terra consente quella scarsa ma utilissima illuminazione indiretta che ci consente di captare forme, buchi e altre caratteristiche pericolose per chi vuole manovrare nell’ombra, o nelle condizioni esemplificate sopra. La diretta conseguenza di questo chiaroscuro lunare è, ad esempio, la percezione distorta della profondità nelle zone polari – proprio quelle esplorate da Viper. Ai poli infatti l’illuminazione del suolo lunare da parte del Sole avviene con angoli molto inclinati e vicini all’orizzonte durante tutto il giorno, creando ombre molto lunghe e un elevatissimo contrasto fra zone illuminate e oscure – condizioni ricche di incertezze e insidie per un rover in esplorazione.
«È molto difficile riuscire a percepire qualcosa per un robot o anche un essere umano che debba analizzare queste immagini, perché le telecamere non hanno la sensibilità per poter vedere i dettagli che servono per rilevare una roccia o un cratere», spiega Uland Wong, informatico dell’Ames Research Center della Nasa e responsabile dell’hardware di navigazione di Viper. «Nessuna missione prima d’ora ha esplorato i poli lunari e non conosciamo molto a proposito delle condizioni di illuminazione e di come queste possano influenzare la navigazione robotica e l’esplorazione stessa di terreni ignoti».
Alcune di queste sfide visive sono evidenti già nelle immagini della superficie lunare scattate durante le missioni Apollo, ma le prime missioni hanno sempre aspettato il “pomeriggio” lunare per effettuare l’esplorazione diretta, in modo che gli astronauti potessero camminare sulla superficie in sicurezza sfruttando una buona illuminazione.
Per navigare nell’ombra, i piloti del rover Viper hanno dunque deciso di affidarsi a un sistema di luci e telecamere montate sul telaio – ottenendo così anche il primato di primo rover dotato di fari a led. Per assicurarsi che il sistema di luci riesca a rivelare gli ostacoli che si nascondono nell’ombra – consentendo di girare al largo dai massi, di percorrere in sicurezza ripide discese nei crateri e di evitare altri pericoli potenzialmente mortali – il team di Viper ha recentemente testato alcuni prototipi in una riproduzione ad alta fedeltà di un paesaggio lunare presso l’Ames Research Center della Nasa nella Silicon Valley, in California.
«Affrontiamo sfide simili a quelle di qualsiasi progettista di automobili», continua Wong. «Che si tratti di un rover o del prossimo modello di berlina, un cattivo design delle luci significa che il guidatore non riuscirà a vedere i dettagli del paesaggio. Sulla Luna occorre però prestare ulteriore attenzione a queste sfide, perché una volta che Viper sarà giunto a destinazione non si può più tornare indietro.»
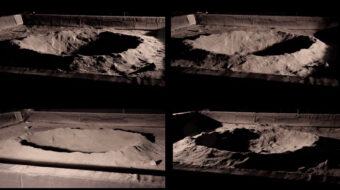
Immagini stereoscopiche estratte dai 12 scenari di crateri ricreati dal team Vipers per simulare le condizioni di luce ai poli lunari. Crediti: Nasa/Uland Wong
Diversi progetti di luci sono stati allestiti quindi attorno al banco di prova lunare. I ricercatori hanno simulato le condizioni di illuminazione e la composizione del terreno lunare utilizzando regolite, un materiale con proprietà riflettenti uniche generate dall’erosione spaziale – fenomeno assente sulla Terra grazie all’atmosfera e alla presenza dell’acqua. Il modo in cui la luce si riflette sulla forma frastagliata dei singoli granelli infatti, insieme all’uniformità del colore, fa sì che l’aspetto dell’ambiente appaia diverso se questo viene illuminato da direzioni diverse – perdendo di consistenza sulla visuale a diversi angoli di illuminazione.
Per simulare i poli lunari, inoltre, il team ha eseguito i test prima illuminando questo terreno con fasci di luce ad angoli d’incidenza molto bassi, poi nel buio più totale – Viper infatti si avventurerà in luoghi che non ricevono mai la luce diretta del Sole. Hanno quindi acceso le luci dei vari prototipi di led candidati, hanno scattato foto come farà Viper un giorno, e ora stanno confrontando la qualità delle immagini ottenute.
Le luci di Viper saranno array di led montati su un palo: due di questi proietteranno un fascio stretto e a lunga distanza, mantre sei luci posizionate alla base del rover potranno illuminare – più soffusamente – una vasta area circostante, e potranno essere accese e spente singolarmente a seconda delle necessità. Durante i test, il team ha prestato particolare attenzione al variare delle prestazioni ottiche con il posizionamento dei led, per comprendere come gestire al meglio il riflesso della luce stessa, o backscattering: un problema drammatico sulla Luna, causato dalla capacità elevata della polvere superficiale di riflettere la luce, con il rischio di accecare le telecamere del rover.